Hallo allemaal,
Een week geleden ben ik begonnen met het experimenteren met Rocrail. Nogmaals voor de duidelijkheid: de overweging om over te stappen op Rocrail was de mogelijkheid om in de toekomst de baan aan te kunnen sturen met een tablet. Het heeft dus helemaal niets te maken met eventuele beperkingen van Koploper als die er al zouden zijn.
In deze bijdrage wil ik mijn ervaringen met jullie delen en probeer daarin zo objectief mogelijk te zijn.
Het installeren van Rocrail ging probleemloos, alleen was het even zoeken met het goed instellen van alle pads. Toen dit in orde was heb ik een lok aangemaakt en dit gaat vergelijkbaar als in Koploper. Daarna gekeken of deze lok in hand aan te sturen was, en jawel hoor, het werkte! De communicatie tussen Rocrail en de Tams was een feit

Vervolgens gestart met het tekenen van een baanplan en dat viel tegen. Wat een kl? werk om al die kleine blokjes op de juiste plaats te zetten

Daarna wissels geprogrammeerd en ook dit werkte direct
Toen was het zaak om de terugmelding zichtbaar te krijgen. De HSI88 aangemeld en aangegeven hoeveel modules er aan iedere streng zitten. Ik verwachte daarmee dat ergens al die terugmeldingen aangemaakt zouden zijn en het een kwestie van aanvinken was maar helaas, iedere terugmelding, 1.01 t/ 1.16, 2.01 tm 2.16, enz moest handmatig aangemaakt worden. Op te merken is ook dat Rocrail adressen gebruikt van 1, 2, 3, 4, enz ipv 1.01, 1.02, 1.03, 1.04, enz. Een exelfile was nodig om fouten te voorkomen.
Na enkele terugmeldingen aangemaakt en ingetekent te hebben dit eerst getest en jawel hoor, ook dit werkte direct
Na het in werking krijgen van de lok bediening, wisselaansturing en terugmelding was het tijd voor het aanmaken van blokken en rijwegen. Het is even zoeken maar als je het weet hoe het werkt is het niet zo moeilijk. In koploper gebeurd dit trouwens door het aanmaken van een ?spin? en dat vind ik persoonlijk wat makkelijker gaan.
Nu eerst wat plaatjes zodat de verschillen goed zichtbaar zijn. Ik heb mij daarbij beperkt tot de belangrijkste 3 vensters en dat zijn voor mij de loklijst, het lokscherm en het baanplan. Hier eerst een schermprint van beide loklijsten:
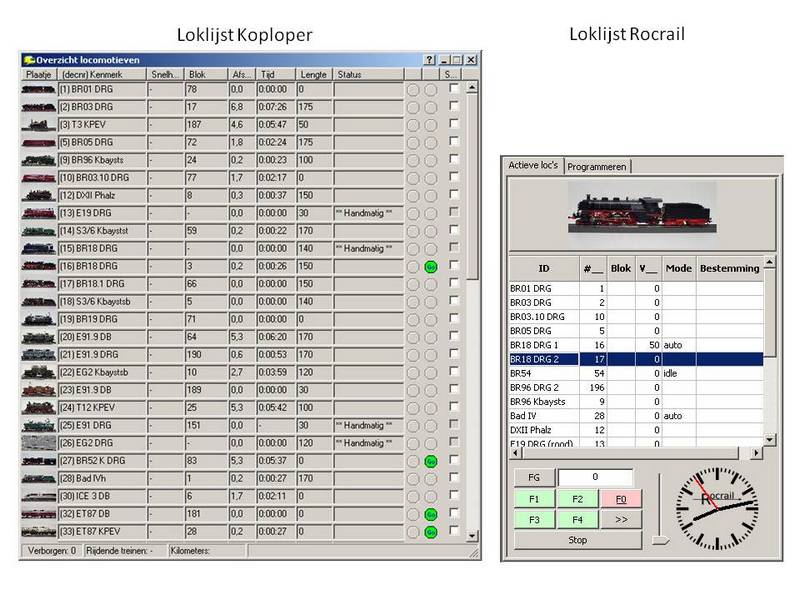
Bij Rocrail zie je alleen de foto van de geselecteerde lok, bij Koploper zie je van iedere lok een foto en dit vind ik erg makkelijk. Misschien dat dit in Rocrail ook mogelijk is maar anders gaat op dit punt mijn voorkeur naar Koploper.
Hier nu een vergelijk tussen beide lokschermen:
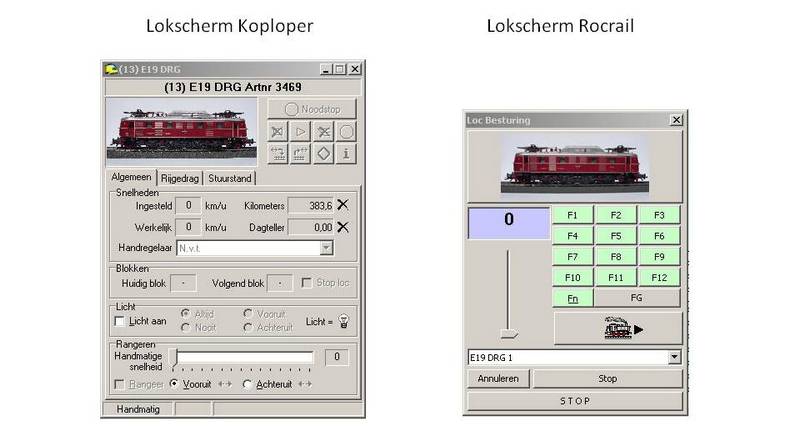
Duidelijk zichtbaar is het verschil aan informatie. Mijn mening is dat ook hier Koploper een duidelijke voorsprong heeft op Rocrail. Met name het kunnen aflezen van huidig en volgend blok en de info helemaal onderaan is van zeer grote waarde. Tijdens automaat bedrijf kun je hier zelfs zien welke melder verwacht wordt.
En dan nu het baanplannen:
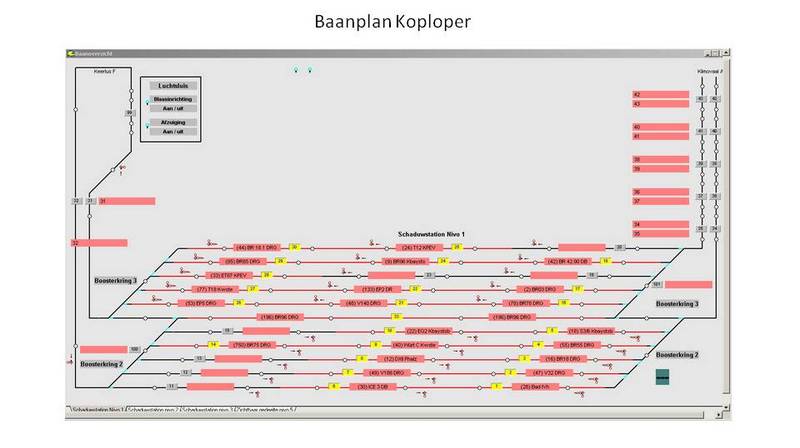
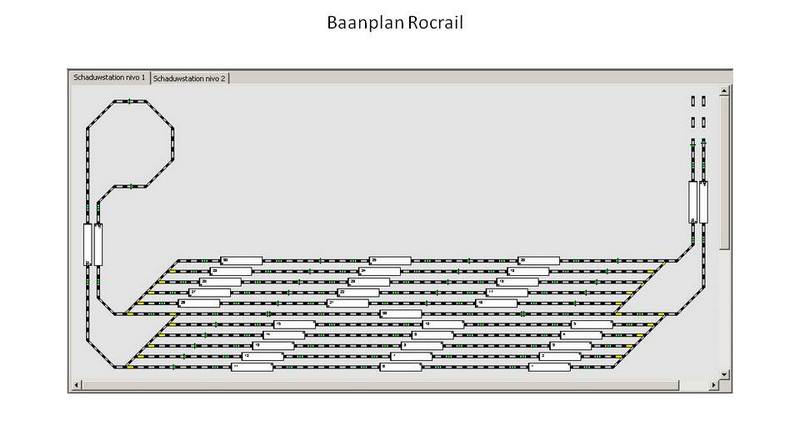
Het Rocrail baanplan is nog niet ?af? maar dit ziet er wel mooier uit dan dat van Koploper. Een puntje is wel dat de blok- en loknummers nauwelijks te lezen zijn maar dit is misschien aan te passen?
En dan komen we nu bij het lastigste, het rijgedrag van de loks.
Na het aanmaken van rijwegen en blokken heb ik een lok laten rijden van blok naar blok. De decoder van de lok stond ingesteld voor Koploper en dat betekent bij mij dat de massasimulatie van de decoder op ongeveer 25% staat. Zoals jullie hier in eerdere opmerkingen al hebben kunnen lezen stuurt Rocrail maar één opdracht bij het binnenrijden van een blok(sectie). Nu hebben mijn blokken maar twee secties dus om te voorkomen dat de lok in de stopsectie tever doorschiet, had ik de snelheid van het blok beperkt op 40km/u. Hoe gaat dit nu bij een massasimulatie instelling van 25%: De lok komt aan met 70, remt in het begin van het blok direct af naar 40 en remt bij aankomst aan de stopsectie verder af naar ?0?. Dit remmen ging vrij abrubt en was dus niet om aan te zien
Toen de massasimulatie van de decoder ingesteld op 100%. Lok komt weer aan met 70km/u, remt vloeiend af naar 40, blijft even op 40 en remt bij de stopsectie vloeiend af naar ?0? waarbij deze tever doorschoot. Vervolgens de massasimulatie teruggezet naar zo?n 75% en toen stopte de lok wel binnen de stopsectie. Het gevolg daarvan was echter dat de lok langer op 40km/u bleef rijden. Voor mij niet echt bevredigend omdat al deze bewegingen met Koploper lekker vloeiend verlopen zonder ook maar iets aan de decoder te veranderen. Volgens mij kun je dit alleen maar netjes laten werken als je minimaal 3 secties per blok hebt en dan nog. Je hebt verschillende bloklengtes, verschillende treintypes met verschillende snelheden, enz, enz. Nee, helaas, ik heb daarna weer koploper ingeschakeld en genoten van het mooie vloeiende rijgedrag
Mijn persoonlijke conclusie:
Rocrail is op zich een mooi programma wat nog volledig in ontwikkeling is. Het programmeren is goed te doen maar toch wel veel werk. De mogelijkheden van Rocrail zijn groot en zoals ik kan inschatten toch wel vergelijkbaar met die van Koploper. Het grote probleem is echter (nog) het rijgedrag. Ik ben geen voorstander in het klooien aan decoders en al zeker niet als je daarvoor de kap moet verwijderen. Daarnaast geloof ik niet dat je daarmee het rijgedrag met Koploper kunt evenaren. Aldert heeft dus helemaal gelijk en ik blijf dan ook trouw aan koploper
Groetjes, John